У трехфазного счетчика электричества Меркурий 230 ART есть шина CAN, с помощью которой можно подключить Arduino.
Для этого нужен такой преобразователь уровней MAX485 (RS-485 Module TTL to RS-485)

С помощью такого подключения можно получить различные данные, в том числе текущее напряжение и ток на всех фазах, а еще показатели день/ночь потребленной энергии (цифры, которые мы передаем в МосЭнерго).
Протокол обмена данными можно скачать на официальном сайте, в этой PDF.
На шине CAN может быть одновременно много устройств, у каждого из них есть свой ID. Сначала нужно определить ID нашего счетчика, для этого мы шлем для каждого ID от 1 до 255 запрос на тестирование канала связи, состоящий из 4 байт:
- ID счетчика
- 0 (команда "запрос на тестирование канала связи")
- CRC
- CRC
Если на шине есть устройство с данным ID, то оно ответит тоже четырьмя байтами. Запищем этот ID, мы будем его использовать при каждом обращении к счетчику. См. функцию scanDeviceIds() ниже в коде, она используется только один раз для получения идентификатора устройства.
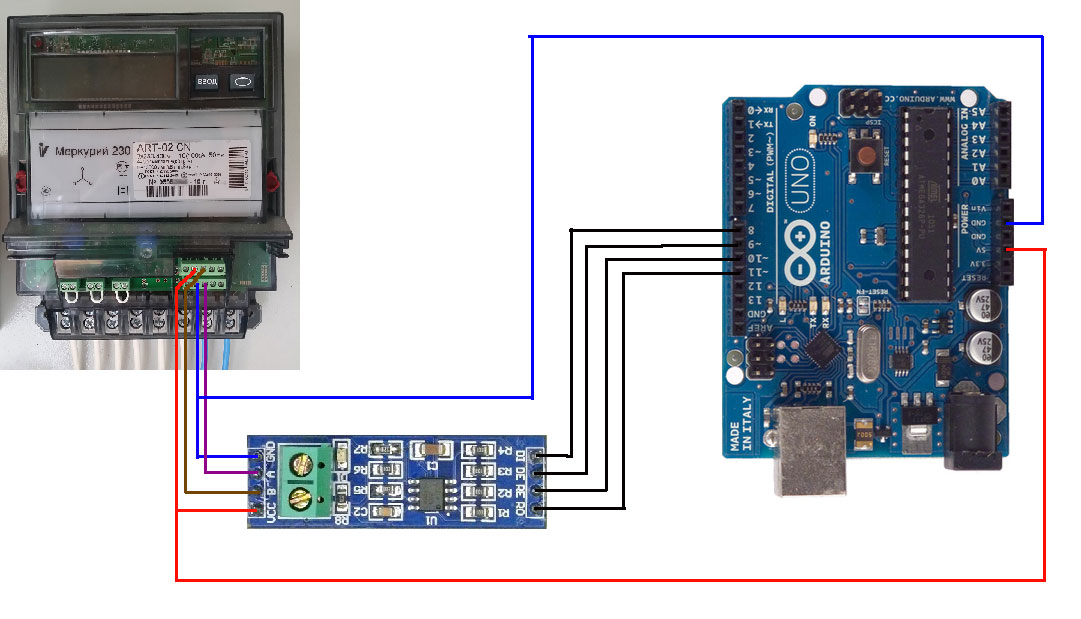
Схема подключения:
Код Arduino:
#include <SoftwareSerial.h>
#define SSerialRx 11 // Serial Receive pin RO
#define SSerialTx 8 // Serial Transmit pin DI
#define SSerialTxControl 9 // RS485 Direction control
#define SSerialRxControl 10 // RS485 Direction control
#define RS485Transmit HIGH
#define RS485Receive LOW
#define Pin13LED 13
SoftwareSerial RS485Serial(SSerialRx, SSerialTx); // Rx, Tx
int byteReceived;
int byteSend;
//byte cmd[] = {0x00, 0x0E, 0x8E, 0x5A, };
//byte cmd1[] = {0x0, 0x0, 0x01, 0xB0};
byte cmd_test_con[] = {46, 0x0};
//byte cmd2[] = {46, 0x1, 0x00, 0xD0};
//byte cmd1[] = {0x0, 0x2, 0x80, 0x71, };
byte cmd_access[] = {46, 0x1, 0x1, 1, 1, 1, 1, 1, 1};
byte cmd_read_time[] = {46, 0x4, 0x0};
byte cmd_r[] = {46, 8, 0x16, 0x11};
byte cmd_0[] = {46, 5, 0, 0};
byte cmd_1[] = {46, 5, 0, 1};
byte cmd_2[] = {46, 5, 0, 2};
void setup() {
Serial.begin(9600);
pinMode(Pin13LED, OUTPUT);
pinMode(SSerialTxControl, OUTPUT);
pinMode(SSerialRxControl, OUTPUT);
digitalWrite(SSerialTxControl, RS485Receive);
digitalWrite(SSerialRxControl, RS485Receive);
RS485Serial.begin(9600);
delay(3000);
Serial.println("start");
send(cmd_test_con, sizeof(cmd_test_con));
send(cmd_access, sizeof(cmd_access));
Serial.println(getCounter(46, 1));
Serial.println(getCounter(46, 2));
send(cmd_0, sizeof(cmd_0));
send(cmd_1, sizeof(cmd_1));
send(cmd_2, sizeof(cmd_2));
}
void loop() {
for(int f=1; f<=3; f++) {
int v = getVoltage(46, f);
Serial.print(v);
Serial.print(" ")
}
for(int f=1; f<=3; f++) {
int v = getCurrent(46, f);
// Serial.print(" I=");
Serial.print(v);
Serial.print(" ");
}
Serial.println();
delay(1000);
return;
byte cmd_r1[] = {46, 8, 0x11, 0x21};
send(cmd_r1, sizeof(cmd_r1));
delay(1000);
byte cmd_r2[] = {46, 8, 0x11, 0x22};
send(cmd_r2, sizeof(cmd_r2));
delay(1000);
byte cmd_r3[] = {46, 8, 0x11, 0x23};
send(cmd_r3, sizeof(cmd_r3));
}
void scanDeviceIds() {
for(int i=0; i<=255; i++) {
byte cmd[] = {i, 0};
send(cmd, sizeof(cmd));
delay(1000);
}
}
void send(byte *cmd, int s) {
Serial.print("sending...");
unsigned int crc = crc16MODBUS(cmd, s);
unsigned int crc1 = crc & 0xFF;
unsigned int crc2 = (crc>>8) & 0xFF;
digitalWrite(SSerialTxControl, RS485Transmit); // Init Transceiver
digitalWrite(SSerialRxControl, RS485Transmit); // Init Transceiver
for(int i=0; i<s; i++) {
RS485Serial.write(cmd[i]);
Serial.print(cmd[i]);
Serial.print(" ");
}
RS485Serial.write(crc1);
RS485Serial.write(crc2);
Serial.print("crc: ");
Serial.print(crc1);
Serial.print(" ");
Serial.print(crc2);
Serial.println();
digitalWrite(SSerialTxControl, RS485Receive); // Init Transceiver
digitalWrite(SSerialRxControl, RS485Receive); // Init Transceiver
delay(200);
if (RS485Serial.available()) {
while (RS485Serial.available()) {
byteReceived = RS485Serial.read(); // Read received byte
Serial.print(" ");
digitalWrite(Pin13LED, HIGH); // Show activity
Serial.print(byteReceived); // Show on Serial Monitor
delay(1);
digitalWrite(Pin13LED, LOW); // Show activity
}
delay(1000);
}
Serial.println();
}
void sendCmd(byte *cmd, int s, byte *response) {
unsigned int crc = crc16MODBUS(cmd, s);
unsigned int crc1 = crc & 0xFF;
unsigned int crc2 = (crc>>8) & 0xFF;
digitalWrite(SSerialTxControl, RS485Transmit); // Init Transceiver
digitalWrite(SSerialRxControl, RS485Transmit); // Init Transceiver
for(int i=0; i<s; i++) {
RS485Serial.write(cmd[i]);
//Serial.print(cmd[i]); // Show on Serial Monitor
//Serial.print(" ");
}
//Serial.print(" crc: ");
RS485Serial.write(crc1);
RS485Serial.write(crc2);
digitalWrite(SSerialTxControl, RS485Receive); // Init Transceiver
digitalWrite(SSerialRxControl, RS485Receive); // Init Transceiver
delay(200);
//Serial.print(" resp: ");
response[0] = 0;
byte i = 1;
while (RS485Serial.available()) {
byteReceived = RS485Serial.read();
response[i++] = byteReceived;
Serial.print(byteReceived); // Show on Serial Monitor
Serial.print(" ");
}
response[0] = i-1;
//Serial.println(); // Show on Serial Monitor
}
int getVoltage(int addr, byte f) {
byte cmd[] = {addr, 8, 0x11, 0x10+f};
byte response[17];
sendCmd(cmd, sizeof(cmd), response);
if(response[0] < 6) return -1;
return ((int)response[3+1]*256 + response[2+1])/100;
}
long getCounter(int addr, byte f) {
byte cmd[] = {addr, 5, 0, f};
byte response[22];
sendCmd(cmd, sizeof(cmd), response);
if(response[0] < 6) return -1;
long r = 0;
r |= (long)response[2+1]<<24;
r |= (long)response[1+1]<<16;
r |= (long)response[4+1]<<8;
r |= (long)response[3+1];
return r;
}
int getCurrent(int addr, byte f) {
byte cmd[] = {addr, 8, 0x11, 0x20+f};
byte response[17];
sendCmd(cmd, sizeof(cmd), response);
if(response[0] < 6) return -1;
return ((int)response[3+1]*256 + response[2+1]);
}
unsigned int crc16MODBUS(byte *s, int count) {
unsigned int crcTable[] = {
0x0000, 0xC0C1, 0xC181, 0x0140, 0xC301, 0x03C0, 0x0280, 0xC241,
0xC601, 0x06C0, 0x0780, 0xC741, 0x0500, 0xC5C1, 0xC481, 0x0440,
0xCC01, 0x0CC0, 0x0D80, 0xCD41, 0x0F00, 0xCFC1, 0xCE81, 0x0E40,
0x0A00, 0xCAC1, 0xCB81, 0x0B40, 0xC901, 0x09C0, 0x0880, 0xC841,
0xD801, 0x18C0, 0x1980, 0xD941, 0x1B00, 0xDBC1, 0xDA81, 0x1A40,
0x1E00, 0xDEC1, 0xDF81, 0x1F40, 0xDD01, 0x1DC0, 0x1C80, 0xDC41,
0x1400, 0xD4C1, 0xD581, 0x1540, 0xD701, 0x17C0, 0x1680, 0xD641,
0xD201, 0x12C0, 0x1380, 0xD341, 0x1100, 0xD1C1, 0xD081, 0x1040,
0xF001, 0x30C0, 0x3180, 0xF141, 0x3300, 0xF3C1, 0xF281, 0x3240,
0x3600, 0xF6C1, 0xF781, 0x3740, 0xF501, 0x35C0, 0x3480, 0xF441,
0x3C00, 0xFCC1, 0xFD81, 0x3D40, 0xFF01, 0x3FC0, 0x3E80, 0xFE41,
0xFA01, 0x3AC0, 0x3B80, 0xFB41, 0x3900, 0xF9C1, 0xF881, 0x3840,
0x2800, 0xE8C1, 0xE981, 0x2940, 0xEB01, 0x2BC0, 0x2A80, 0xEA41,
0xEE01, 0x2EC0, 0x2F80, 0xEF41, 0x2D00, 0xEDC1, 0xEC81, 0x2C40,
0xE401, 0x24C0, 0x2580, 0xE541, 0x2700, 0xE7C1, 0xE681, 0x2640,
0x2200, 0xE2C1, 0xE381, 0x2340, 0xE101, 0x21C0, 0x2080, 0xE041,
0xA001, 0x60C0, 0x6180, 0xA141, 0x6300, 0xA3C1, 0xA281, 0x6240,
0x6600, 0xA6C1, 0xA781, 0x6740, 0xA501, 0x65C0, 0x6480, 0xA441,
0x6C00, 0xACC1, 0xAD81, 0x6D40, 0xAF01, 0x6FC0, 0x6E80, 0xAE41,
0xAA01, 0x6AC0, 0x6B80, 0xAB41, 0x6900, 0xA9C1, 0xA881, 0x6840,
0x7800, 0xB8C1, 0xB981, 0x7940, 0xBB01, 0x7BC0, 0x7A80, 0xBA41,
0xBE01, 0x7EC0, 0x7F80, 0xBF41, 0x7D00, 0xBDC1, 0xBC81, 0x7C40,
0xB401, 0x74C0, 0x7580, 0xB541, 0x7700, 0xB7C1, 0xB681, 0x7640,
0x7200, 0xB2C1, 0xB381, 0x7340, 0xB101, 0x71C0, 0x7080, 0xB041,
0x5000, 0x90C1, 0x9181, 0x5140, 0x9301, 0x53C0, 0x5280, 0x9241,
0x9601, 0x56C0, 0x5780, 0x9741, 0x5500, 0x95C1, 0x9481, 0x5440,
0x9C01, 0x5CC0, 0x5D80, 0x9D41, 0x5F00, 0x9FC1, 0x9E81, 0x5E40,
0x5A00, 0x9AC1, 0x9B81, 0x5B40, 0x9901, 0x59C0, 0x5880, 0x9841,
0x8801, 0x48C0, 0x4980, 0x8941, 0x4B00, 0x8BC1, 0x8A81, 0x4A40,
0x4E00, 0x8EC1, 0x8F81, 0x4F40, 0x8D01, 0x4DC0, 0x4C80, 0x8C41,
0x4400, 0x84C1, 0x8581, 0x4540, 0x8701, 0x47C0, 0x4680, 0x8641,
0x8201, 0x42C0, 0x4380, 0x8341, 0x4100, 0x81C1, 0x8081, 0x4040
};
unsigned int crc = 0xFFFF;
for(int i = 0; i < count; i++) {
crc = ((crc >> 8) ^ crcTable[(crc ^ s[i]) & 0xFF]);
}
return crc;
}
Если не получается получить данные со счетчика (т.е. Arduino не видит счетчик):
- между A и B поставить резистор 120 ом, см http://docs-europe.electrocomponents.com/webdocs/0030/0900766b8003006e.pdf
- попробовать поменять провода A и B, идущие с счетчику
- проверить, что к счетчику подается 5 вольт
- счетчик такой же, как этот? трехфазный меркурий?
- поддерживает ли он этот протокол (буковки CN в названии проверить)?
- осциллографом убедиться, что наши сигналы доходят до самих контактов счетчика
- замыкая на ноль и плюс убедиться, что наша программа видит сигналы, насколько это возможно